En 4ème, tous les établissements de l’Académie de Grenoble ont été doté d’un aspirateur autonome capable de passer sous les meubles, de contourner les pieds de chaise, d’éviter les marches d’escalier et de retourner tout seul à sa base pour se recharger.
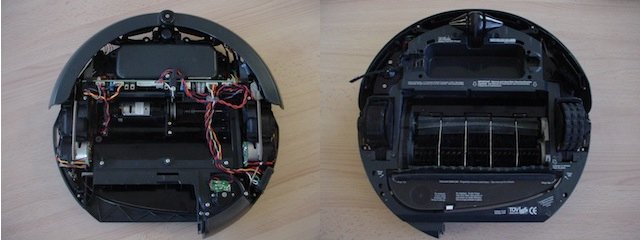
En partant de l’observation du comportement de l’aspirateur autonome dans son environnement, les élèves de 3ème sont amenés à concevoir un robot à l’aide du pack NXT/LME.

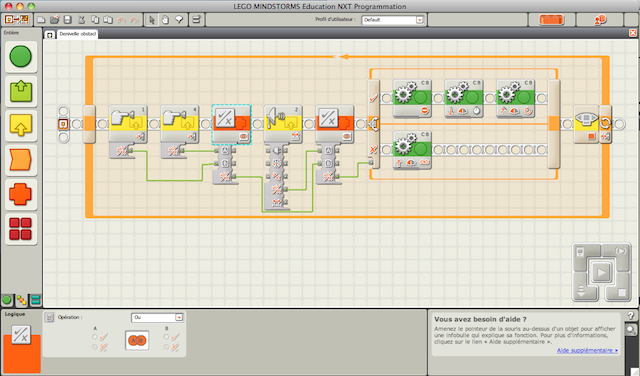
Ils découvrent la programmation pour simuler ce comportement à l’aide des capteurs et des servomoteurs du pack NXT. Le logiciel LME offre quant à lui une interface issue de LabVIEW dans laquelle la programmation est entièrement graphique.
Ils étudient la chaîne d’énergie qui permet à l’aspirateur autonome de se déplacer dans son environnement mais aussi les chaînes d’informations qui lui sont indispensables pour détecter les obstacles ou le vide.
La conception de ce robot est réalisée avec le logiciel Lego Digital Designer. Cette application permet aux élèves de modéliser tout ou partie d’un robot en recherchant et en sélectionnant des éléments dans une bibliothèque de constituants Lego Mindstorms puis en les intégrant dans la représentation numérique du robot NXT.
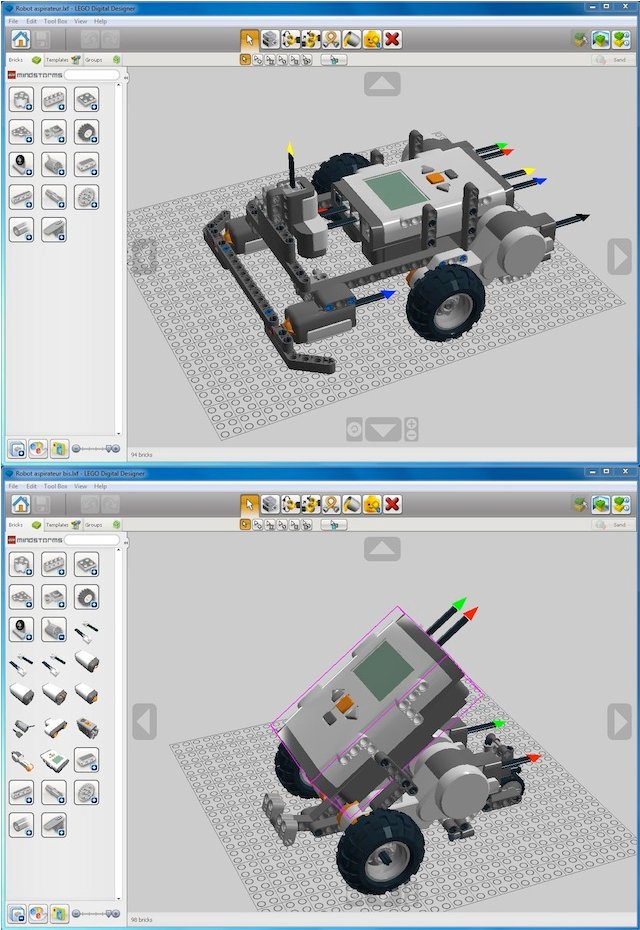
Une fois le robot modélisé en 3D à l’aide du mode "construction", les élèves visualisent ce modèle virtuel à l’aide du mode "vue" puis obtenir un guide d’assemblage pour construire ce robot à l’aide des éléments du pack NXT. Le guide d’assemblage est généré en pages HTML et peut être imprimé.

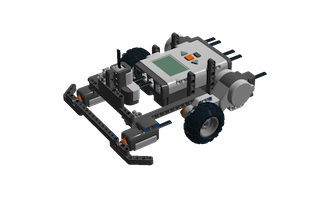
La notice de montage de l’un des robots NXT utilisés par mes élèves de 4ème :
Les modèles virtuels des deux robots réalisés avec Lego Digital Designer :

Le programme présenté ci-dessus en NXT-G :